Bonsoir,
Bonne année.
J'ai fini le n° 98.
J'ai installé la caméra, connecté tous les câbles du panneau avant sur les modules électronique, le moteur qui fait tourner la tête et la croix de détection de position de la tête.
Alors, au boulot...
1° La caméraJe te conseille de n'enlever la protection qu'au dernier moment (avant de mettre la coiffe) pour ne pas l'âbimer.

Lorsque tu installeras la lentille, il y a une petite patte qui permet d'enlever la protection facilement

Une fois installer, voilà ce que cela donne

Pour info, la caméra est fixée mécaniquement mais pas électroniquement.
Attention au câble (ne pas plier ou torsader - fragile).
2° Les connexionsJ'espère que tu n'as pas de gros doigts.
Il y a un connecteur qui n'est pas facile à insérer.

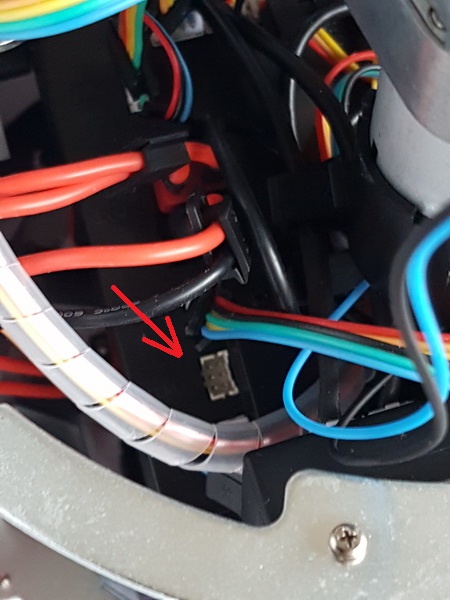
C'est un connecteur avec 6 fils. Le noir est côté extérieur et le rouge côté intérieur.
3° Installation du moteur faisant tourner la tête.Aucune difficulté. Ne te trompe pas de sens.
Le conseil: Afin d'éviter de faire tomber la rondelle dans le corps, place la vis + rondelle directement dans son trou mais à la main (pas avec le tournevis). Je parle d'expérience. J'ai mis 10 min à retrouver la rondelle coincée au fond du robot.
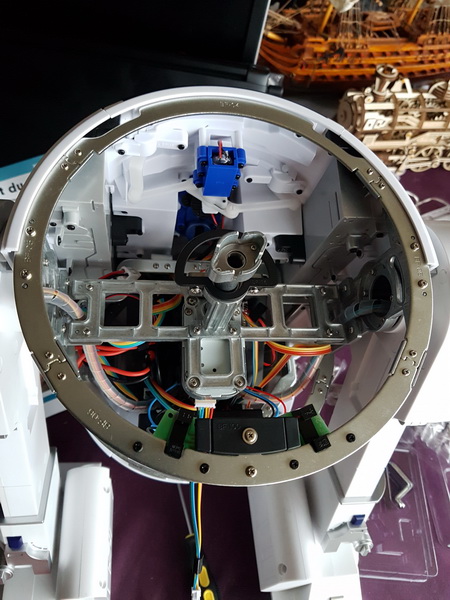
 4° la croix de détection de position de la tête.
4° la croix de détection de position de la tête.Ici, cela a été un peu plus compliqué. j'ai cassé un tournevis.
Pour insérer les vis (cercle vert), n'hésite pas à débloquer les vis (cercle rouge).

Mon instinct me dit qu'il va falloir ajuster cette pièce lors des tests de fonctionnement de la tête.
Je pense que si l'axe de cette pièce n'est pas allignée avec les autres, la tête va provoquer un "balourd" et elle risque de s'arrêter !
C'est mon idée! J'espère me tromper
Que la force soit avec toi
_________________
André
95% des problèmes informatique se situent toujours entre le clavier et la chaise.