Bonsoir Corbak,
Je vois qui a du taf...
Bon, nous allons regarder un problème à la fois et dans l'ordre que tu nous l'explique
Remarque : Je ne connais pas tes compétences en électronique.
Je pars sur le principe que tu ne connais pas (ne le prend pas mal).
Le pied droit qui ne fonctionne pas:
As tu encore ces plans?
J'ai expressement mis les photos en 1024 et pas 600.
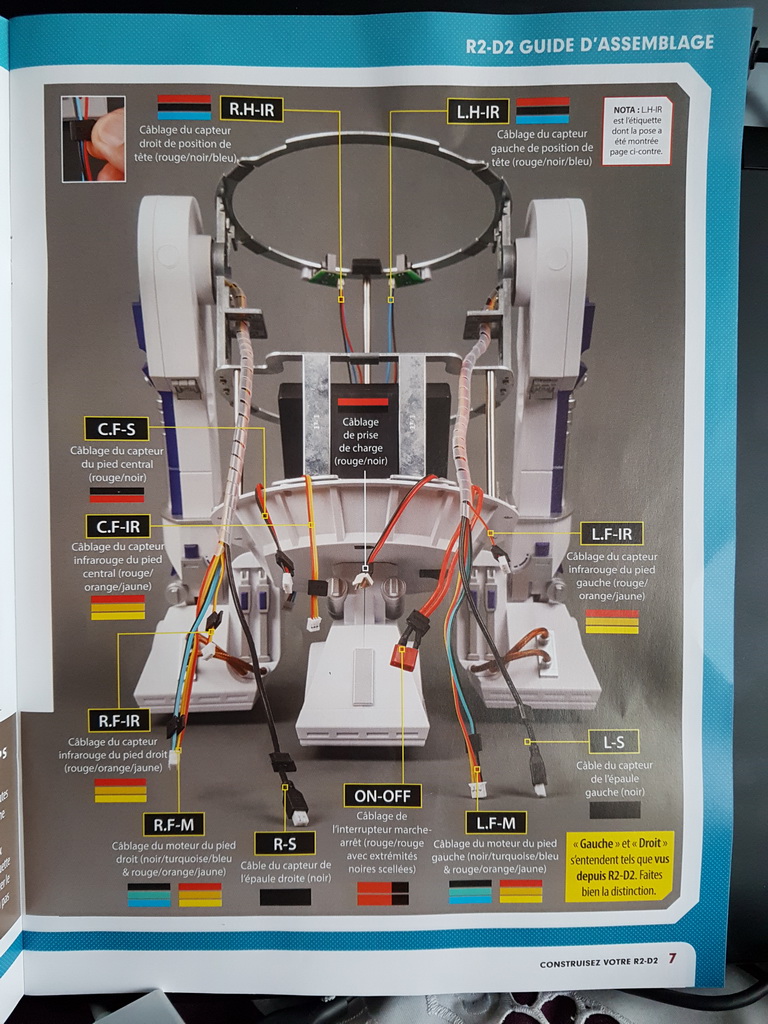
Ce qui va nous interesser, c'est la connexion
R.F-M (en bas à gauche sur le plan)

Le point 10 et 11 sur ce second plan.
Avant de faire quoi que se soit:
Soit certain de ne plus avoir d'électricité statique sur toi en te mettant à la terre !Autrement tu vas griller le module électronique !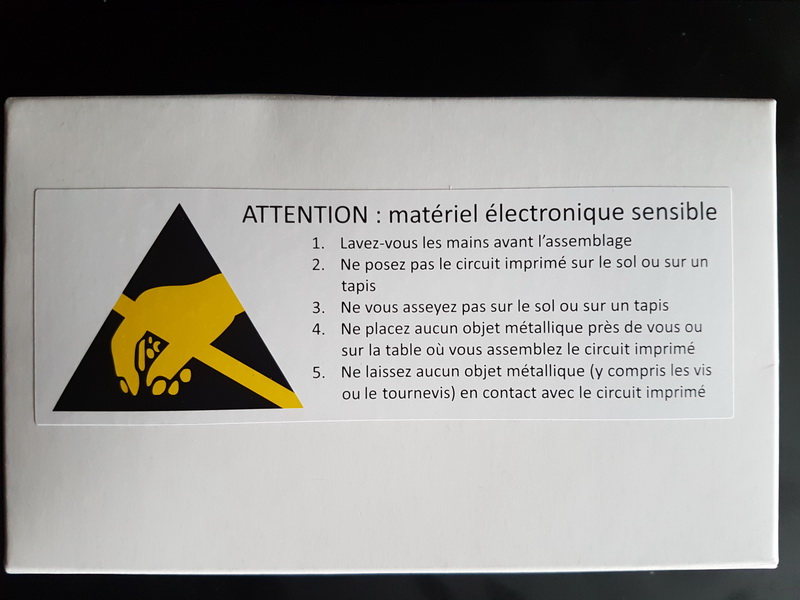
Tu vas devoir démonter le cache devant le moteur!
Le risque est réel que tu vas devoir également démonter toute les garnitures de la jambe droite

Déconnecte le cable du boitier noir et du moteur (ce cable que tu vois ci-dessus)
As-tu un multi-mètre?
Il va falloir mesurer la continuité de chaque fil (voir si avec l'écrasement un brain ne serait pas foutu).
Ensuite (je parle de mon expérience),
J'ai dû redémonter tout 3x uniquement pour pouvoir installer les câbles correctement

Le plus important, la large trame de câble (qui va au moteur)
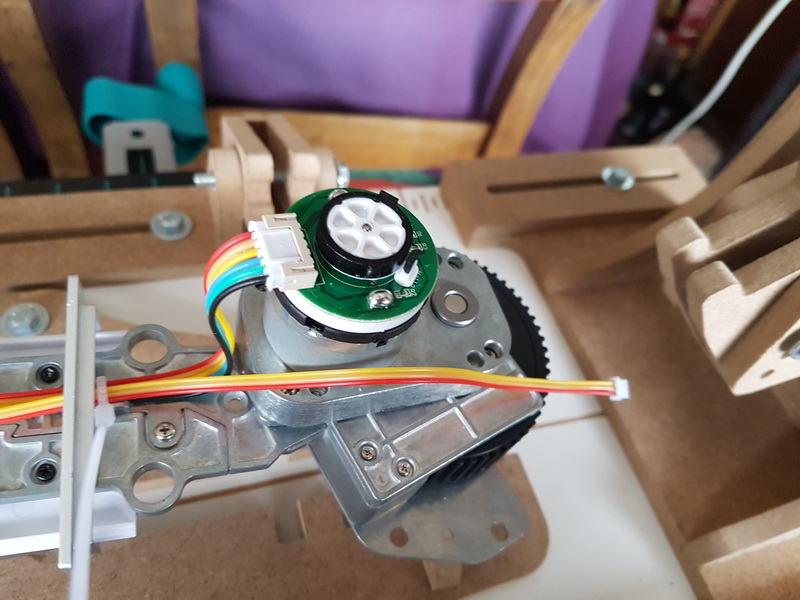
Au-dessus : sans les garnitures
En-dessous: avec la garniture de la jambe

Il viens quasi contre le moteur (à la verticale). De plus, j'ai contrôlé que le connecteur blanc soit bien positionné.
Le câble jaune / rouge, longe la boite de vitesse du moteur.
Je pense, que le connecteur (femelle) (sur le moteur) ou le connecteur mâle (sur le cable) est soit plié, soit à moitié déconnecté.
Je pense plus tôt à la 2ème hypothèse.
A mon avis, lorsque le robot à tourné, cela à tiré dessus.
La longueur de ce câble est vraiment juste en longueur.
C'est la raison aussi que les colsons, je ne les ais pas serrés au maximum, justement pour conserver une souplesse (une liberté) de mouvement des fils.
Question au passage:

La tresse de câble du pied droit (flèche rouge) ne passe pas trop près de l'axe de la tête?
Fait bien attention qu'il y a suffisement de jeux pour que cet tresse de câble soit bien libre.
Maintenant, le câble jaune et rouge (fil fu bas). Regarde ce qui dépasse par rapport à la roue noire.
J'espère que tu as laisser une longueur environ identique !
Vérifie aussi la continuité de chaque fil.
ATTENTION: Ne pas mettre ton multi-mètre sur les bornes du boitier électronique noire !Raison: le courant fourni par ton appareil de mesure est suffisant élevé pour faire griller le micropocesseur !
prudence !
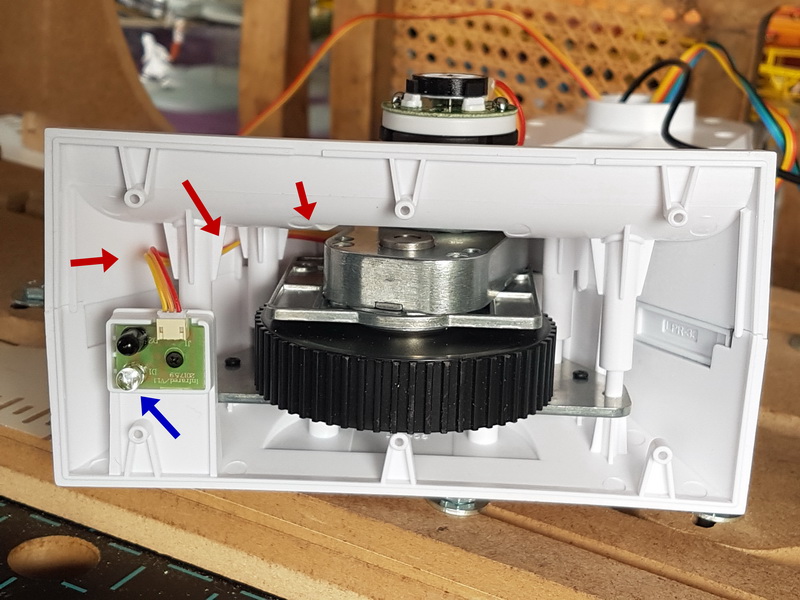
Comment as-tu passé le file vers le capteur ?
Moi, je l'ai fait passer par derrière (flèche rouge)
Pour éviter que le fil ne se prenne dans la roue noire.
En ce qui concerne la LED (flèche bleue), si j'ai bon souvenir (plus certain) lorsque tu le fais fonctionner et que tu prends la caméra de ton GSM, tu devrais le voir visuellement ! elle clignote.
Une fois tous les contrôles fait, reconnecte les 2 câbles sur le boitier noir (d'un côté) et sur le capteur et le moteur (de l'autre).
Ne remonte pas les garnitures !
Essaie
Quels sont les résultats ?
André
_________________
André
95% des problèmes informatique se situent toujours entre le clavier et la chaise.