Bonjour,
Je viens au rapport pour vous rendre compte des résultats d'une petite séance d'essais du
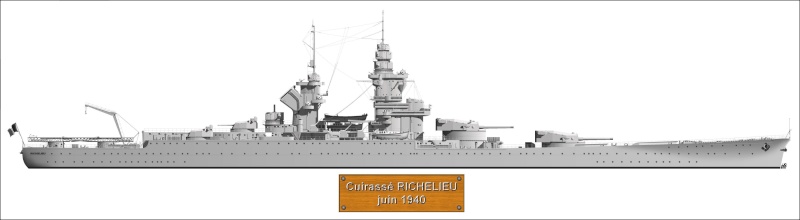
Yamato avec sa nouvelle motorisation.
Les essais, qui avaient pour premier objectif de réajuster le lestage, ont été effectuées en piscine et le modèle était dépourvu de l'ensemble ponts/superstructure/artillerie qui représente 1,3 kg.
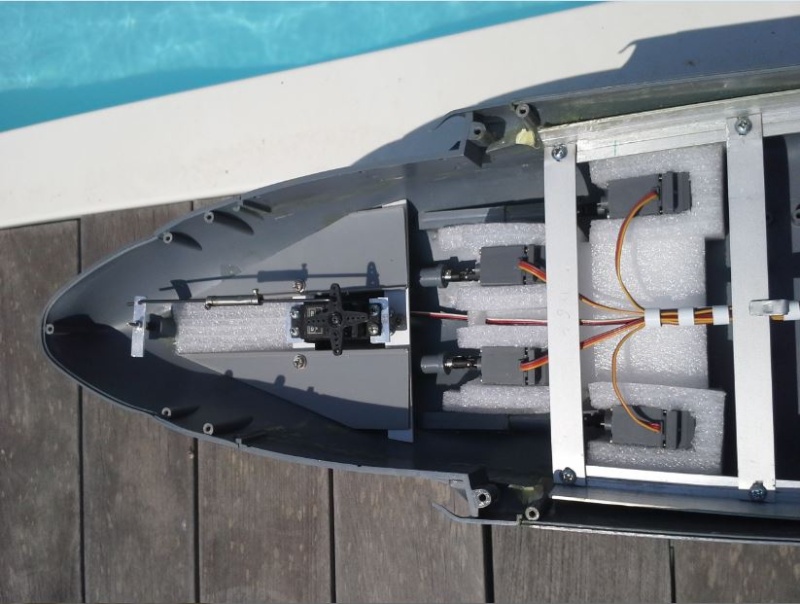
L'addition de poids a donc été réalisé en prenant une marge au niveau de la ligne de flottaison puis l'équilibrage avant/arrière et babord/tribord a été fait sans difficulté grâce aux lignes velcro placées au fond de la coque en transversal.
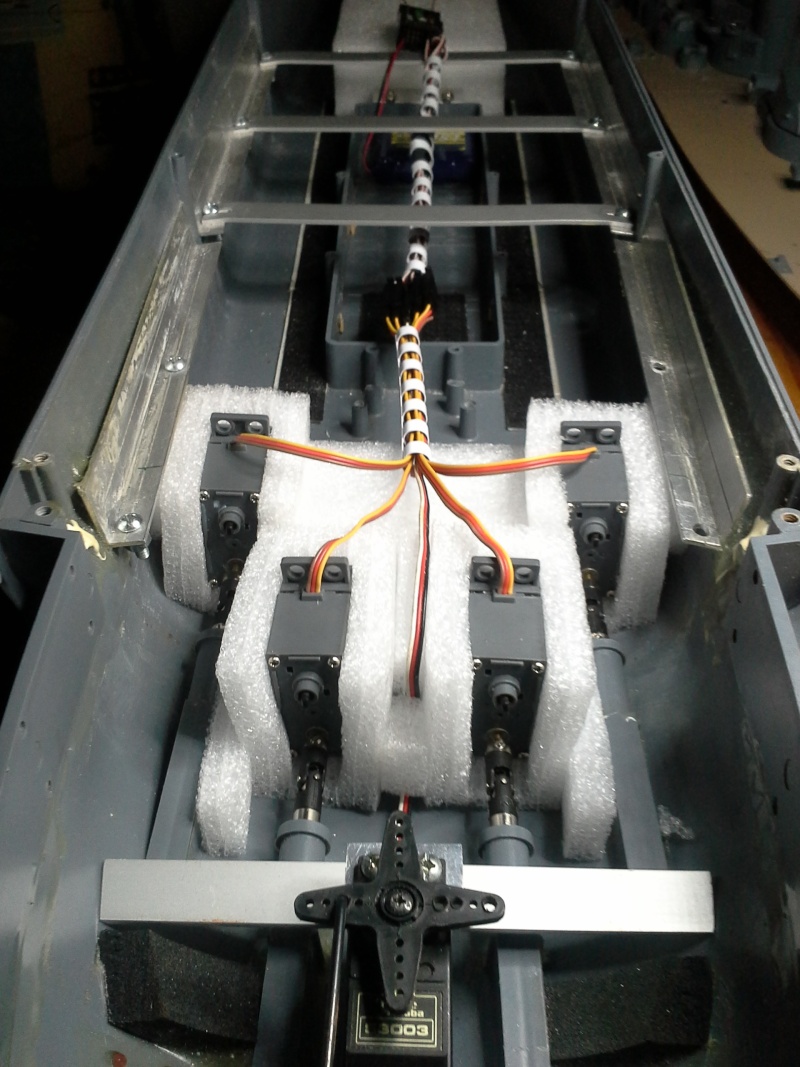
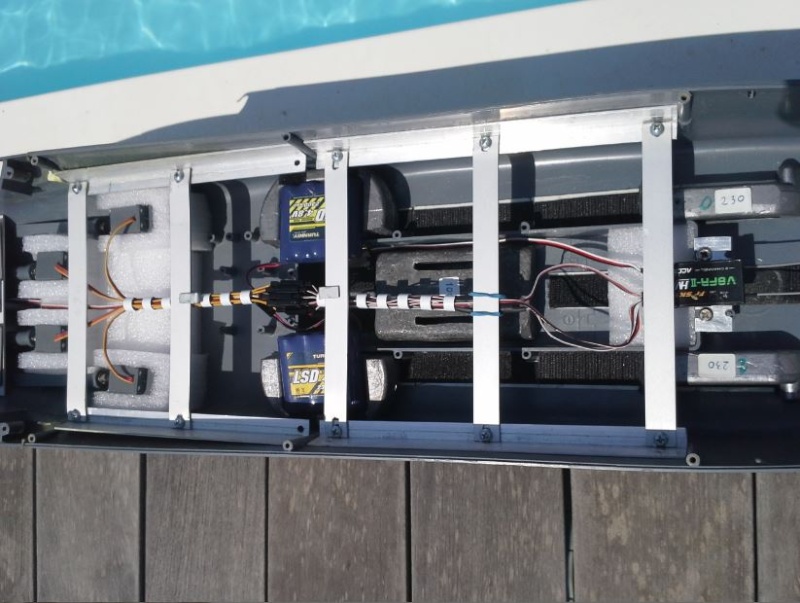
Il y a désormais près de 4 Kg de lest dont on voit la répartition sur les photos (ceux sous les batteries font 740 g chacun)
Voici quelques photos :



Côté essais RC maintenant.
Déjà quelques précisions sur la configuration :
- servo de gouvernail sur voie 1 du récepteur (direct)
- 2 servos de propulsion tribord (couplés par câble en Y) sur voie 2 (direct)
- 2 servos de propulsion babord (couplés par câble en Y) sur voie 3 (direct)
- 1 seule batterie 4,8 V de 2300 mAhV sur voie 8 (direct)
(le seconde batterie visible sur les photos est celle de spare que j'ai placé pour l'équilibrage.
- les 2 voies propulsion sont pour l'instant actionnées Bonjour,
Je viens au rapport pour vous rendre compte des résultats d'une petite séance d'essais du
Yamato avec sa nouvelle motorisation.
Les essais, qui avaient pour premier objectif de réajuster le lestage, ont été effectuées en piscine et le modèle était dépourvu de l'ensemble ponts/superstructure/artillerie qui représente 1,3 kg.
L'addition de poids a donc été réalisé en prenant une marge au niveau de la ligne de flottaison puis l'équilibrage avant/arrière et babord/tribord a été fait sans difficulté grâce aux lignes velcro placées au fond de la coque en transversal.
Voici quelques photos :
Côté essais RC maintenant.
Déjà quelques précisions sur la configuration :
- servo de gouvernail sur voie 1 du récepteur (direct)
- 2 servos de propulsion tribord (couplés par câble en Y) sur voie 2 (direct)
- 2 servos de propulsion bâbord (couplés par câble en Y) sur voie 3 (direct)
- 1 seule batterie 4,8 V de 2300 mAhV sur voie 8 (direct)
(le seconde batterie visible sur les photos est celle de spare que j'ai placé pour l'équilibrage.
- les 2 voies propulsion sont pour l'instant actionnées simultanément
(l'inversion de propulsion bâbord ou tribord pour la manœuvre n'était pas opérationnelle)
et plusieurs enseignements :
du positif :
- la transmission servos/arbres est OK
- très peu de vibration
- niveau sonore vraiment très faible
- l'étanchéité n'a pas été altérée par les modifications
et du négatif :
- toujours de grosses difficultés à mettre au point mort de manière synchronisée et stabilisée les 4 servos avec les petits potentios
- la puissance est un peu limite pour le déplacement des 6,3 kg (1 seule pile 4,8V, c'est peu être un peu juste)
- la manoeuvrabilité reste limitée puisque la gestion de la propulsion dissociée babord/tribord n'est pas active.
Je suis en contact avec Patrick (Patdxfr) pour traiter ces différents points. Je vous tiendrai informé.
à +
Olivier
(l'inversion de propulsion babord ou tribord pour la manœuvre n'était pas opérationnelle)
et plusieurs enseignements :
du positif :
- la transmission servos/arbres est OK
- très peu de vibration
- niveau sonore vraiment très faible
- l'étanchéité n'a pas été altérée par les modifications
et du négatif :
- toujours de grosses difficultés à mettre au point mort de manière synchronisée et stabilisée les 4 servos avec les petits potentios
- la puissance est un peu limite pour le déplacement des 6,3 kg (1 seule pile 4,8V, c'est peu être un peu juste)
- la manœuvrabilité reste limitée puisque la gestion de la propulsion dissociée bâbord/tribord n'est pas active.
Je suis en contact avec Patrick (Patdxfr) pour traiter ces différents points. Je vous tiendrai informé.
à +
Olivier
_________________
Olivier