

Bonsoir à tous.
Le 23 octobre 2017; j'avais posté la construction d'un hydrofoil à passagers et vous avais parlé rapidement d'un système de propulsion tous azimuts qui avait été installé sur un remorqueur portuaire.
Le procédé fonctionnait bien mais le navire avait un problème pour tenir la ligne droite.
J'ai donc fabriqué un bac amphidrome muni de deux de ces systèmes de propulsion. Il est donc possible de corriger sa trajectoire en fonction des courants ou du vent et même de marcher en crabe ou de faire un tour sur place.
Puisque ce système fonctionnait sur des maquettes et n'existait pas après toutes les recherches effectuées, j'en ai donc fait une demande de brevet à l'INPI.
Cela m'a pris pas mal de temps, beaucoup d'échanges avec cet organisme et revendiquer l'originalité de mon brevet au vu des systèmes un peu analogues dont les brevets avaient déjà été déposés.(Certains avant l'année 1900).
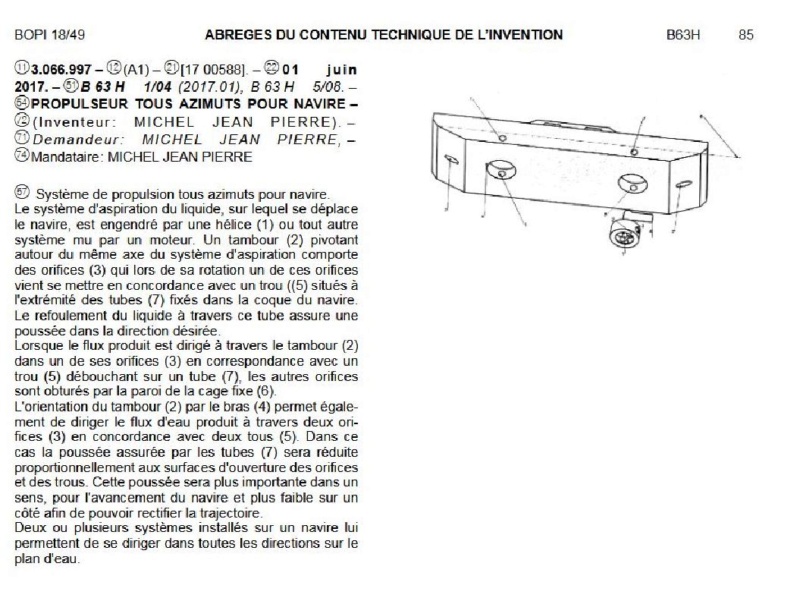
Voici la parution au journal officiel de l'INPI :
Et en voici maintenant sa fabrication :

Construction habituelle tôle étamée 18/100è et renforts en fil électrique 2.5mm2
Un cylindre avec ses 3 sorties est fixé à la coque.

Et voici un tambour percé de 3 trous qui va pivoter à l'intérieur du cylindre

Ici un trou du tambour est en concordance avec un tube du cylindre. Marche avant ou arrière par exemple

Et maintenant une marche combinée avant/tribord ou arrière/bâbord

Un système avec une hélice montée
Voici maintenant la fabrication des rampes d'embarquement qui sont fonctionnelles :

Pour la manœuvre des rampes j'ai lesté l'extrémité intérieure avec du plomb pour les garder relevées et je les pousse pour les abaisser.
Voici donc tout le mécanisme les moteurs couplés aux roues dentées blanches, confectionnées avec une imprimante 3D, vu que je ne trouvais pas le bon diamètre dans le commerce. Les deux tambours sont commandés par deux servos pour assurer leur pivotement et le mécanisme avec vis sans fin pour le mouvement des rampes.

On voit sur le pont dépasser les axes qui arrivaient un peu trop haut pour un des systèmes de propulsion.
Afin de ne pas engager des mesures disciplinaires envers l'ingénieur en chef que j'affectionne particulièrement, je les ai cachés par des voitures.
Et voila le résultat en navigation :

Et l'accostage avec une rampe baissée et les barrières ouvertes :

Et sur le plan d'eau du club :

Voila donc le résultat de mes idées que j'ai emmenées jusqu'au bout car cette aventure n'était pas de tout repos.
Bonne soirée à tous
_________________
Caboteur44
Le 23 octobre 2017; j'avais posté la construction d'un hydrofoil à passagers et vous avais parlé rapidement d'un système de propulsion tous azimuts qui avait été installé sur un remorqueur portuaire.
Le procédé fonctionnait bien mais le navire avait un problème pour tenir la ligne droite.
J'ai donc fabriqué un bac amphidrome muni de deux de ces systèmes de propulsion. Il est donc possible de corriger sa trajectoire en fonction des courants ou du vent et même de marcher en crabe ou de faire un tour sur place.
Puisque ce système fonctionnait sur des maquettes et n'existait pas après toutes les recherches effectuées, j'en ai donc fait une demande de brevet à l'INPI.
Cela m'a pris pas mal de temps, beaucoup d'échanges avec cet organisme et revendiquer l'originalité de mon brevet au vu des systèmes un peu analogues dont les brevets avaient déjà été déposés.(Certains avant l'année 1900).
Voici la parution au journal officiel de l'INPI :

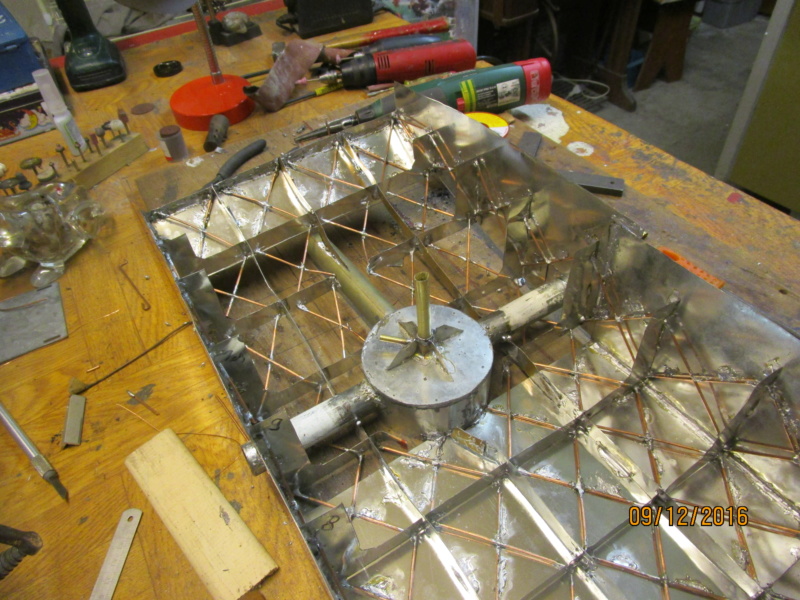
Et en voici maintenant sa fabrication :

Construction habituelle tôle étamée 18/100è et renforts en fil électrique 2.5mm2

Un cylindre avec ses 3 sorties est fixé à la coque.

Et voici un tambour percé de 3 trous qui va pivoter à l'intérieur du cylindre

Ici un trou du tambour est en concordance avec un tube du cylindre. Marche avant ou arrière par exemple

Et maintenant une marche combinée avant/tribord ou arrière/bâbord

Un système avec une hélice montée
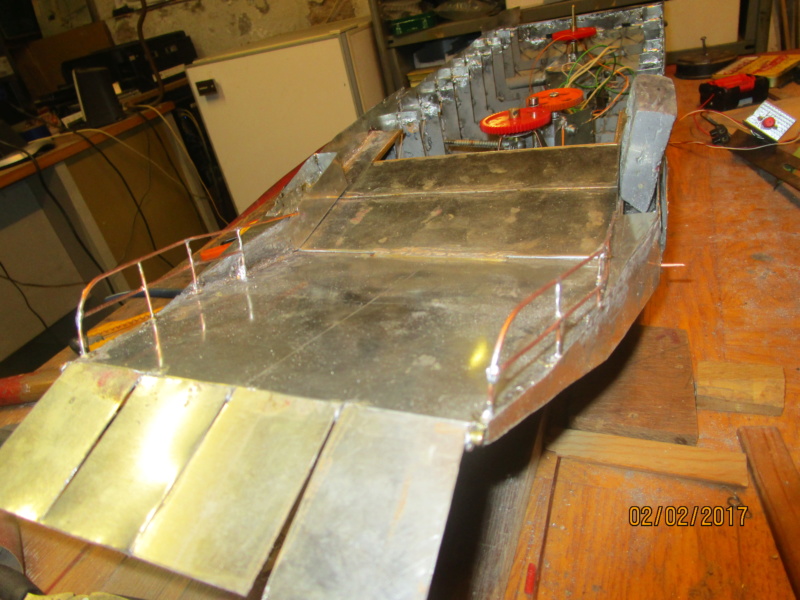
Voici maintenant la fabrication des rampes d'embarquement qui sont fonctionnelles :


Pour la manœuvre des rampes j'ai lesté l'extrémité intérieure avec du plomb pour les garder relevées et je les pousse pour les abaisser.

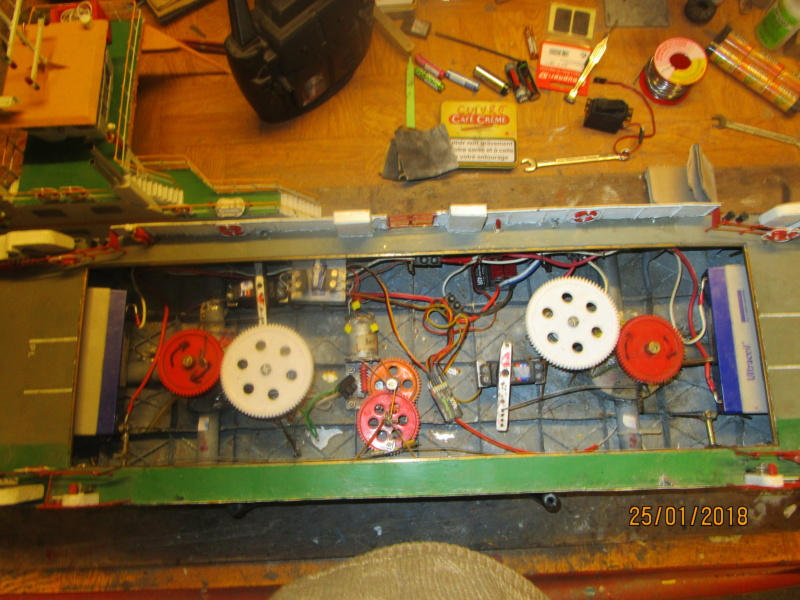
Voici donc tout le mécanisme les moteurs couplés aux roues dentées blanches, confectionnées avec une imprimante 3D, vu que je ne trouvais pas le bon diamètre dans le commerce. Les deux tambours sont commandés par deux servos pour assurer leur pivotement et le mécanisme avec vis sans fin pour le mouvement des rampes.

On voit sur le pont dépasser les axes qui arrivaient un peu trop haut pour un des systèmes de propulsion.
Afin de ne pas engager des mesures disciplinaires envers l'ingénieur en chef que j'affectionne particulièrement, je les ai cachés par des voitures.
Et voila le résultat en navigation :

Et l'accostage avec une rampe baissée et les barrières ouvertes :

Et sur le plan d'eau du club :

Voila donc le résultat de mes idées que j'ai emmenées jusqu'au bout car cette aventure n'était pas de tout repos.
Bonne soirée à tous
_________________
Caboteur44